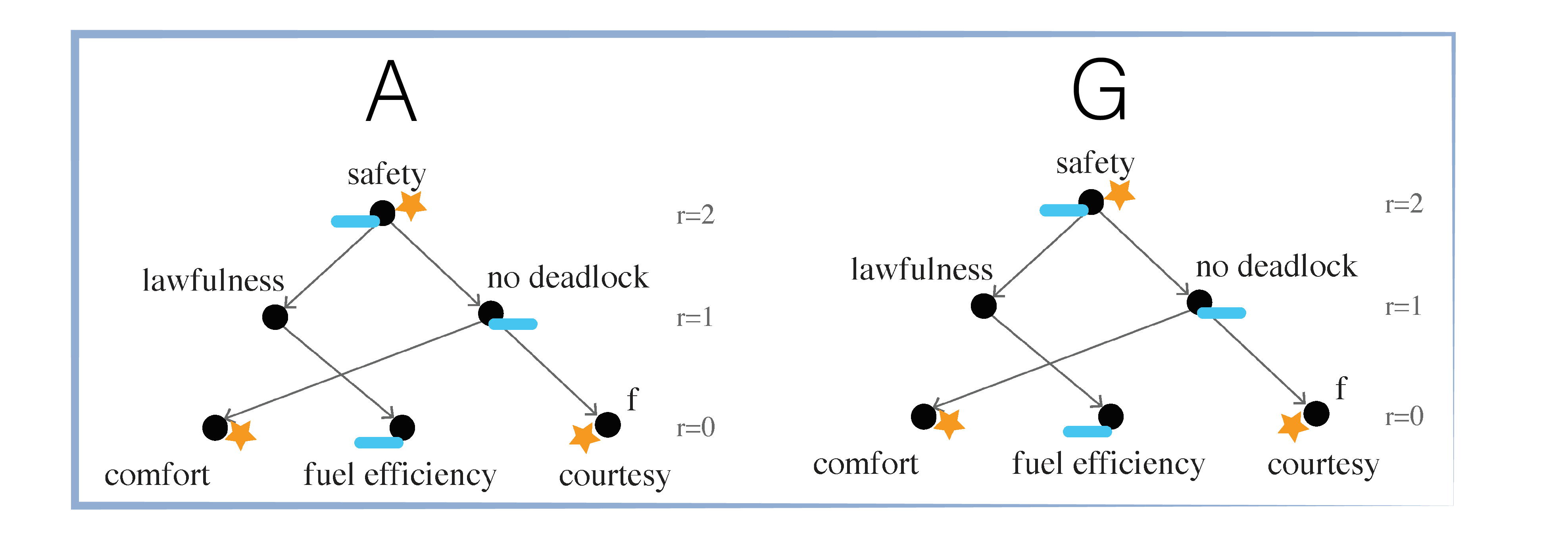
Rules or specifications for autonomous vehicles are currently formulated on a case-by-case basis, and put together in a rather ad-hoc fashion. As a step towards eliminating this practice, we propose a systematic method for ordering an autonomous vehicle's set of specifications so its decision-making process is both transparent and safe. Moreover, we introduce these profiles in the context of assume-guarantee profiles (behavioral contracts) that agents are expected to behave according to.

The ability to guarantee safety and progress for all vehicles is vital to the success of the autonomous vehicle industry. We present a framework for the distributed control of autonomous vehicles that is safe and guarantees progress for all agents. In this paper, we define a protocol agents must use to make decisions. If all agents adhere to the protocol, safety under all specified traffic conditions and liveness for all agents under ‘sparse’ traffic conditions will be guaranteed. We provide proofs of correctness of the protocol and validate our results in simulation.
Conventional simultaneous localization and mapping (SLAM) algorithms rely on geometric measurements and require loop-closure detections to correct for drift accumulated over a vehicle trajectory. Semantic measurements can add measurement redundancy and provide an alternative form of loop closure. We propose two different estimation algorithms that incorporate semantic measurements provided by vision-based object classifiers. An a priori map of regions where the objects can be detected is assumed.